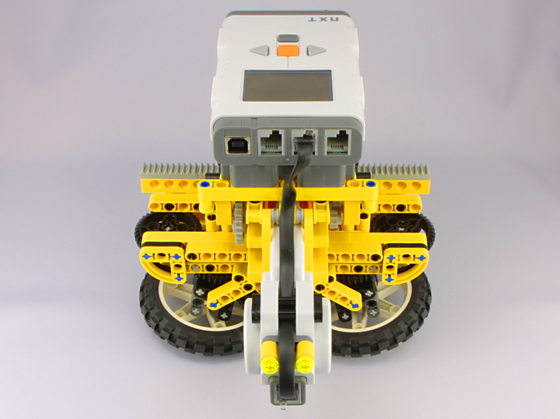
今天,我分享的是如何使用乐高NXT制作一个Android动力和受控双轮自平衡机器人。
首先,我们来看看最终机器人的测试视频。
要构建这个机器人,您需要的所有内容如下所示:
– 两个Android设备。一个用于平衡控制,一个用于远程控制。用于平衡控制的是Nexus 7,用于遥控器是具有简单控制应用的Android智能手机。
– 乐高NXT套件
– 一个Android ADK板。我使用的一个叫做HippoADK。
– 乐高盾牌的ADK板。我使用的是HippoADK-Lego Shield。
– 电池
这个机器人如何工作?
通过使用HippoADK板和HippoADK-Lego Shield,Nexus 7可以读取乐高电机的状态,也可以控制乐高电机。在平衡时,使用Nexus 7中的陀螺仪传感器,机器人可以调整乐高电机的状态以保持平衡。Hippo-ADK是基于Android的开源电子原型平台。通过将Arduino类微控制器板与Android相结合,不仅可以让您轻松实现智能设备的强大资源,还可以以惊人的简洁优雅的方式实现。
我们来看看如何构建这个机器人。

附件pdf 点我下载,文件是乐高NXT机器人主要部分的装配说明。
步骤2:将ADK零件和电池添加到机器人

组装机器人的乐高部件后,您可以使用基于App Inventor的图形编程平台对机器人进行编程。正如你可以看到代码是非常简单的,我们可以在一张照片中显示。
附加了BalanceFilterDemo。您可以使用它与手机的加速度计和陀螺仪一起测试卡尔曼滤波器。
BalanceFilterDemo.zipBalanceFilterDemo.zip下载
安卓手机端以及Nexus 7端
链接地址 下载密码:bujr